3D Printable Projects and Reviews
Hi, my name is Lewis and this my Youtube channel's little corner on the internet where you'll find documentation, FAQ's, build videos and more for my projects.
I Recreated the Stranger Things Walkie-Talkies (THEY ACTUALLY WORK)
How to build your own colour e-ink paper display smart dashboard. Powered by Raspberry Pi Zero 2 W you can show weather, photos, calendars, GitHub stats and more.

PioCreat HALOT-X1 10.1” 16K Resin Printer Review

Elegoo Mars 5 Ultra - 7" 9k AI Resin Printer

3D Print and add some Resin to create some amazing pieces of stained 'glass'.

KINETIC COASTERS with a TWIST! Laser or 3D Printable

How To Make Neon LED Signs | Low Cost with Alexa, Hue & WiFi Controls

A fast and reliable, multi-material, dual print headed printer with a few tricks up its sleeve...

Build your own Super Smart Magic Mirror
How to upgrade your desk to include smart responsive LED lighting and 3D printed upgrades to make your life easier!
We review Elegoo's new computationally superior speed demons... and wow they're fast!

3D Print your own moduler Bluetooth Speaker with cool disco lighting and modular speaker design

How to build your own Filament Spool Smart Lamp
A massive build volume for a smaller price.
The newest Snapmaker, now with Dual Extrusion Printing, 6x quicker CNC Routing and the mighty 10W laser as standard

Bigger and better? Find out more about the new Elegoo Neptune 3 Plus...
How to build customisable 3D Printable Desktop Neon Signs
Produces high quality prints but what's the catch?

How to build a Smart 3D Printed Steam Train with live view POV camera (ESP32-CAM), steam effect and working lantern.

The Snapmaker 10W Laser Module is light speed ahead of its predecessor.

Elegoo Saturn 2 - 10" 8k Resin Printer
How to build a super-sized expandable Seven Segment Display
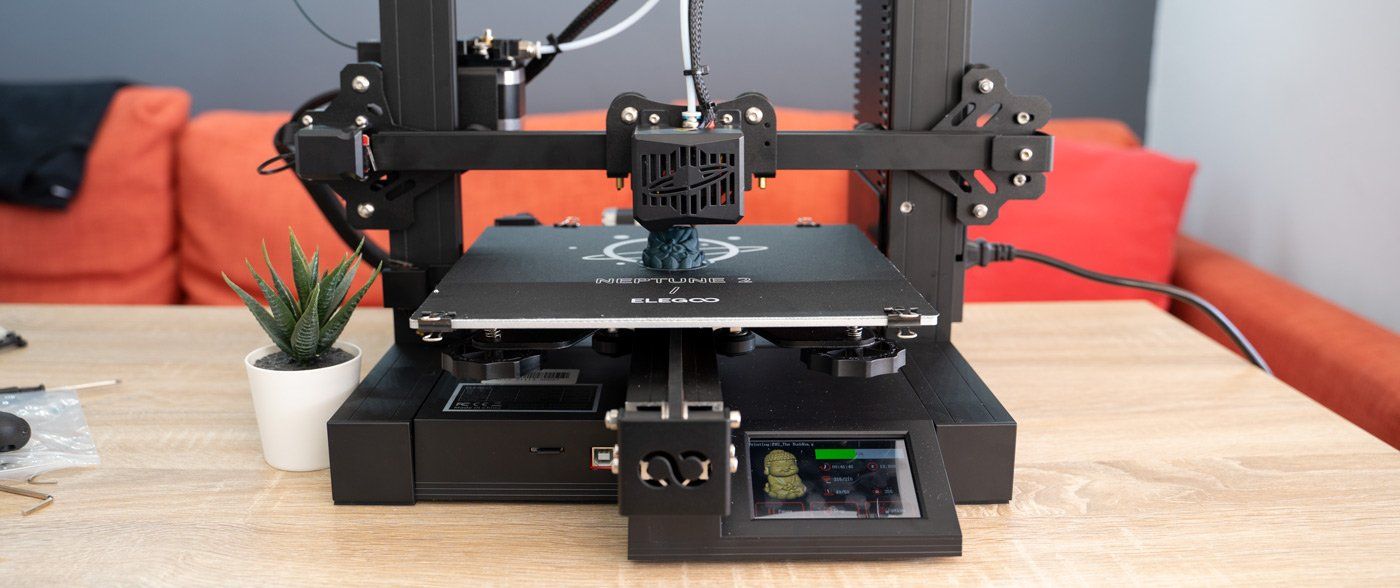
An in-depth hands on review of the updated Elegoo Neptune 3 FDM 3D Printer

How to build your own Weather Forecasting Theatre with ESP32
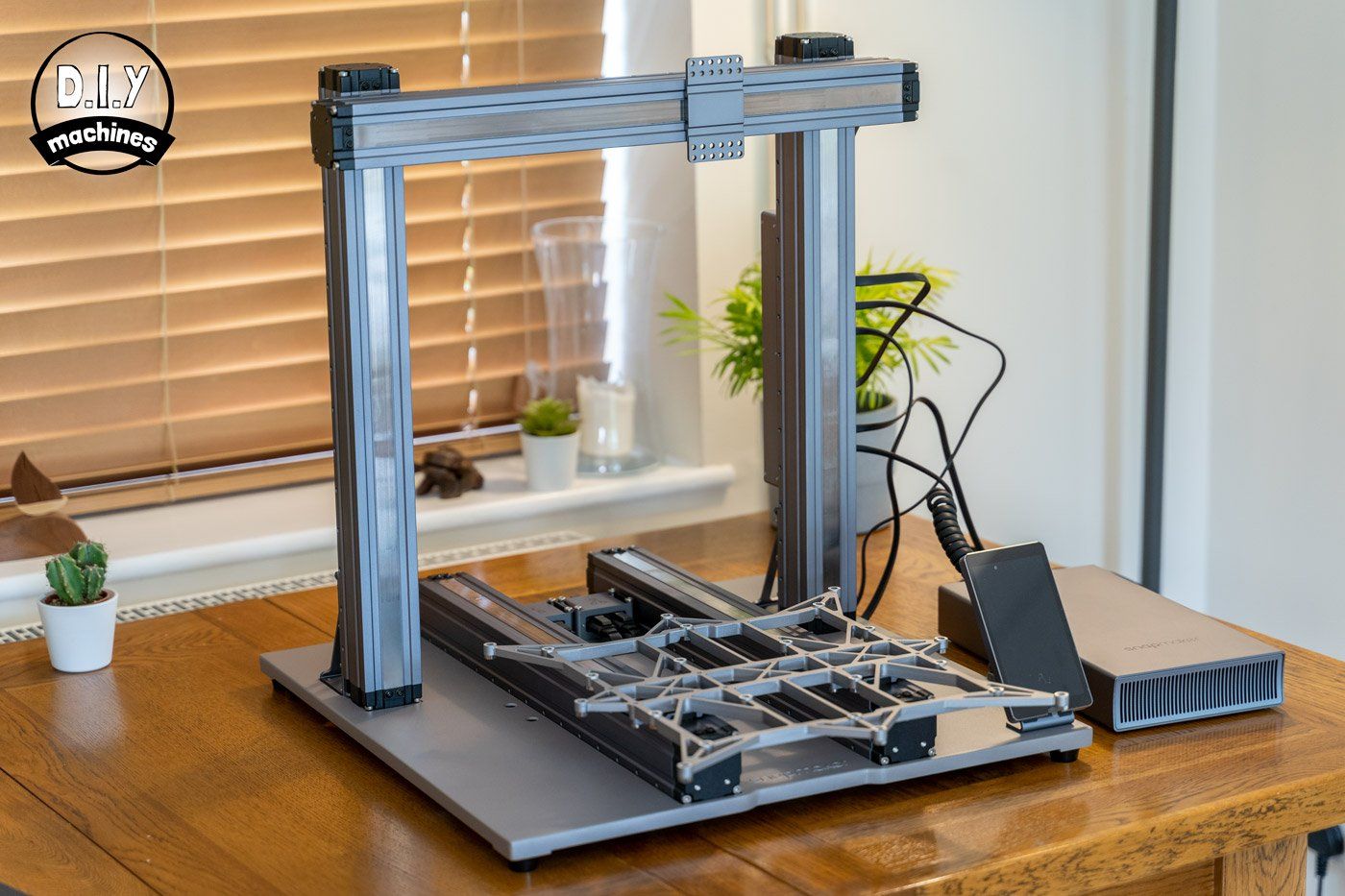
A capable CNC Router, Laser Cutter and 3D Printer in a single machine.

How to build your own Nanoleaf like panels

Improved resolution, speed and style whilst still affordable. Now the good becomes great.

Easily Build a MACHINE THAT DESTROYS WHAT IT CREATES (Kinetic Sand Art Coffee Table)
Elegoo Neptune 2 FDM 3D Printer
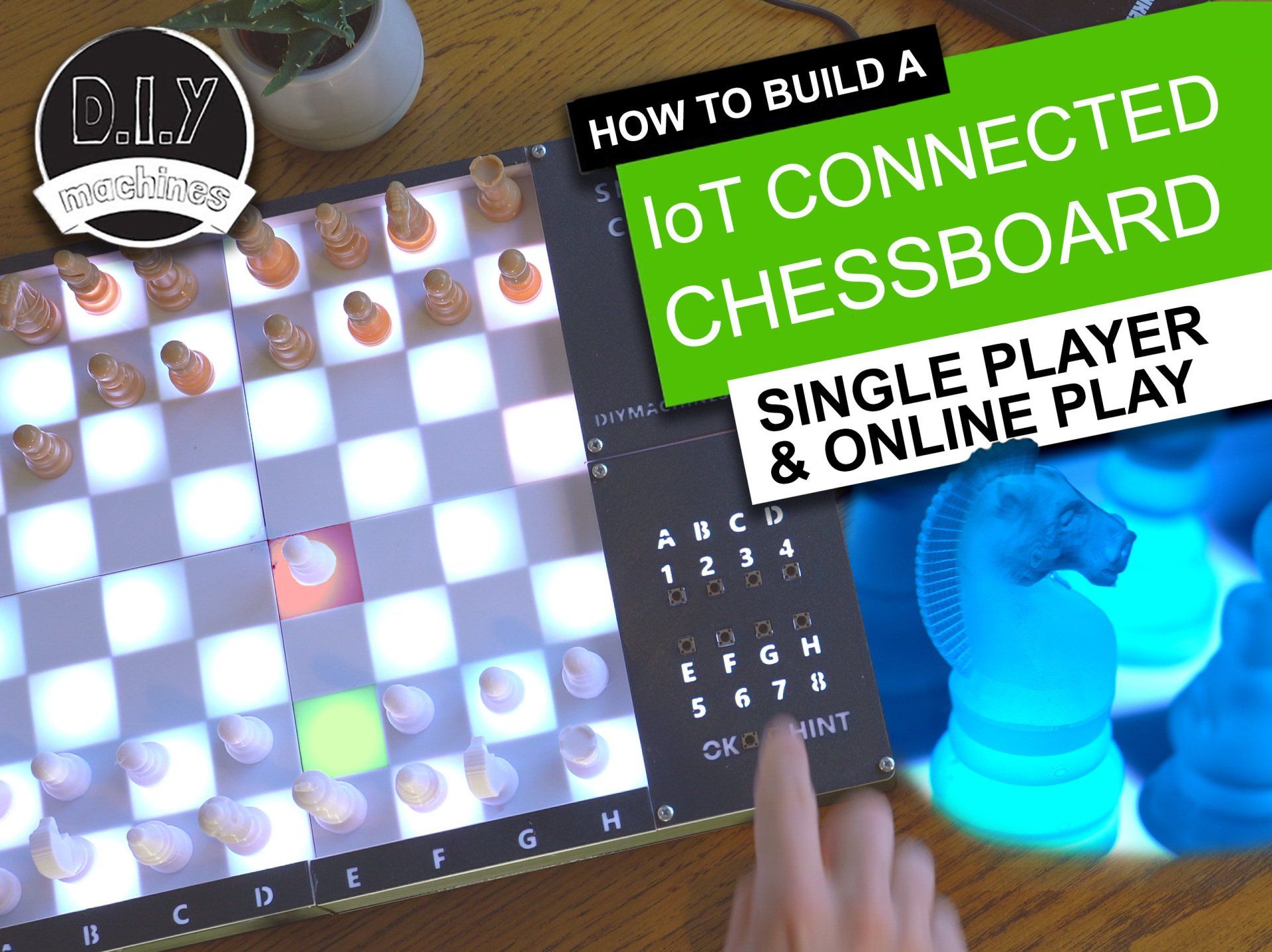
Hello, I’m Lewis, this is DIY Machines, and this is how you can build your own Smart Chessboard for both local and online matches. Though this board has a great single player mode, If you build two, and bond them together digitally you then send one to a friend or loved one so you that you can play chess together over the internet with real chess pieces and only a few seconds of delay. It’s a great way to share some time and to connect with people who are physically distant. Take a look at the video which highlights the main features at the beginning before explaining in detail how to make your own:

How to 3D print and assemble your very own programmable and remote controllable automatic domino laying machine. Who likes knocking down absurdly long runs of dominoes? I do. Who doesn't like laying them all by hand. I don't. That's why I made this. 😊 Using some basic electronics this machine can line up well spaced rows of wooden dominoes. You can drive it around corners, forwards and backwards - just don't drive into your already laid dominoes. You can enter a list of instructions to your robot via the Arduino IDE, upload with USB and then send it on it's way to follow your instructions, or you can open the phone app and drive it live via bluetoo th.

How to 3D print, wire, and program this trio of interactive performing pumpkins. 🎃 🎃 🎃 These three singing squashes are driven by a RaspberryPi and low-cost projector. Your guests pick either a song, scare or haunting tale using the 3D printed control panel and its illuminated arcade buttons. This is housed securely alongside a waterproof speaker and all stands at the end of your drive/garden. This keeps the mains electricity and your projector safely indoors.

This is an easy to build Disney Star Wars BB8 inspired robot. It's controlled by an Arduino UNO over a bluetooth connection from your smartphone.

How to build a 3D printed, battery-powered Hot Wire Foam / Polystyrene cutter.

This drone landing pad features an integrated ultrasonic sensor that detects a drones presence. When a drone departs the Arduino starts a timer. When you return your lap time is displayed to you.
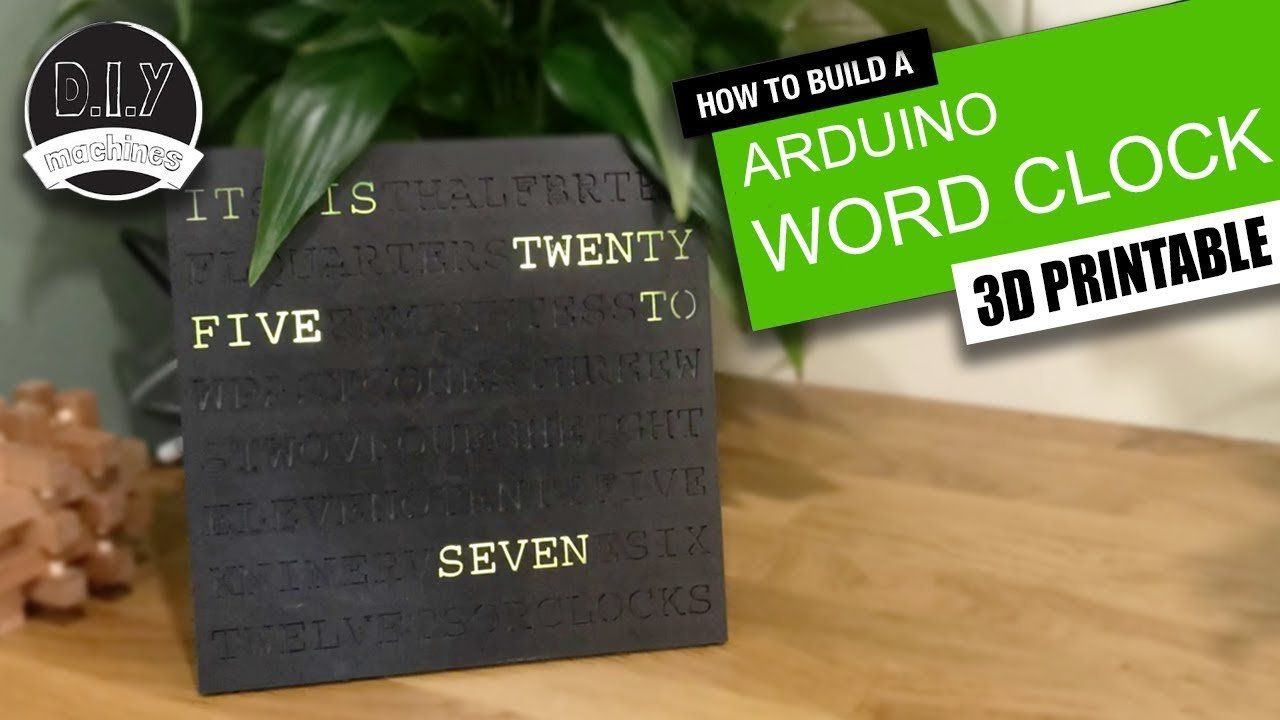
This 3D printable Word Clock displays the time in full sentences by lighting up the hidden words in amongst the jumble of letters.

With a hidden water reservoir, pump and sensors why not make your plant care easy?

Print, assemble and program your own Simon Says game.

Save time and water by automating the watering of your greenhouse, flower beds, hanging baskets or lawn.

Build your own Arduino driven, Bluetooth remote-controlled dry ice effect machine with integrated LED lighting. Perfect for parties, effects, and Halloween.
Make your own Automated Photo Booth for less than hiring one (if you can lay your hands on a DSLR)
Please consider supporting DIY Machines
Subscribe and share
Share projects with friends and family if you think they'll enjoy it. Spread the love.