3D Printable Projects and Reviews
Hi, my name is Lewis and this my Youtube channel's little corner on the internet where you'll find documentation, FAQ's, build videos and more for my projects.

KINETIC COASTERS with a TWIST! Laser or 3D Printable
How To Make Neon LED Signs | Low Cost with Alexa, Hue & WiFi Controls

A fast and reliable, multi-material, dual print headed printer with a few tricks up its sleeve...

Build your own Super Smart Magic Mirror
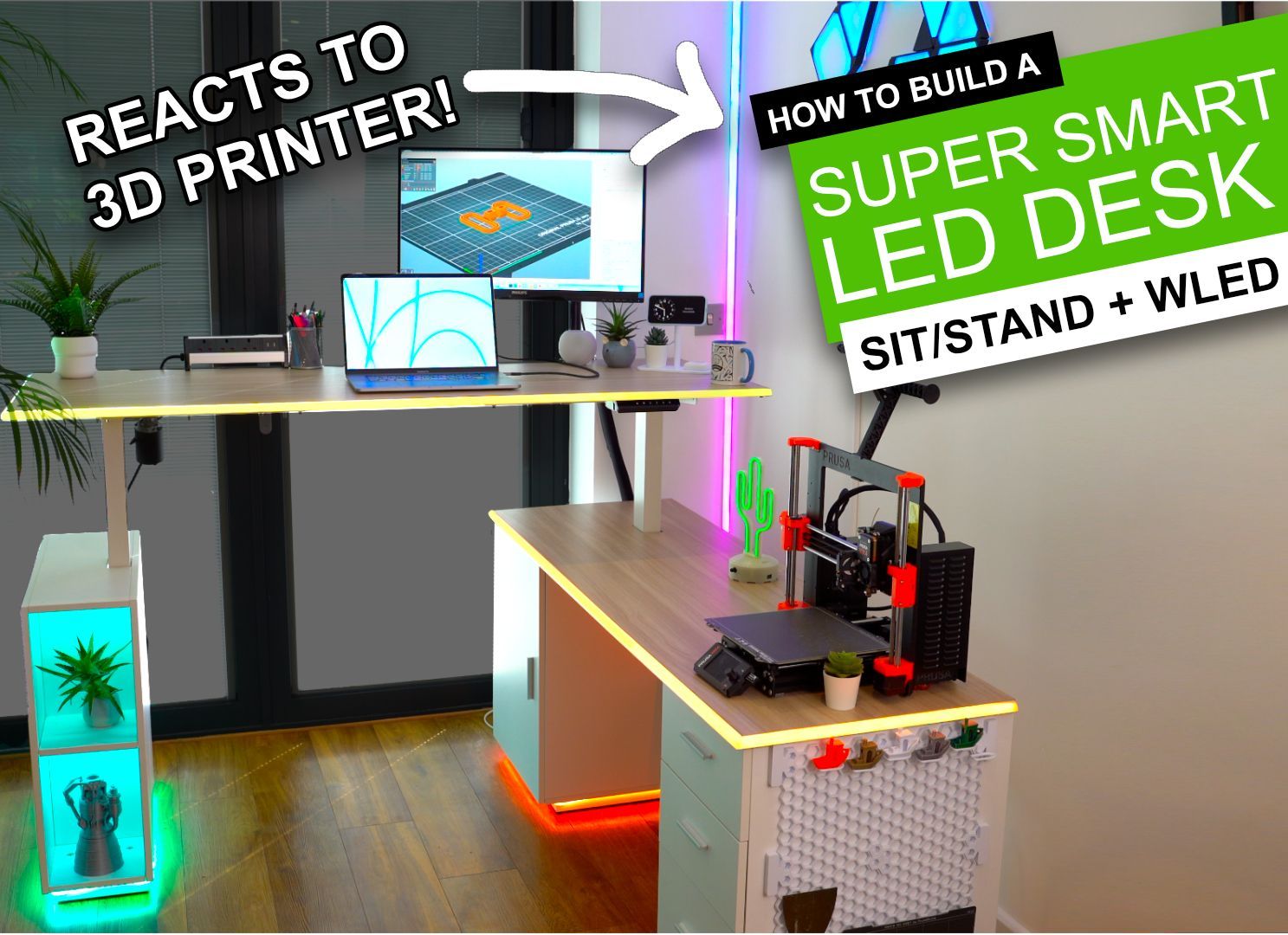
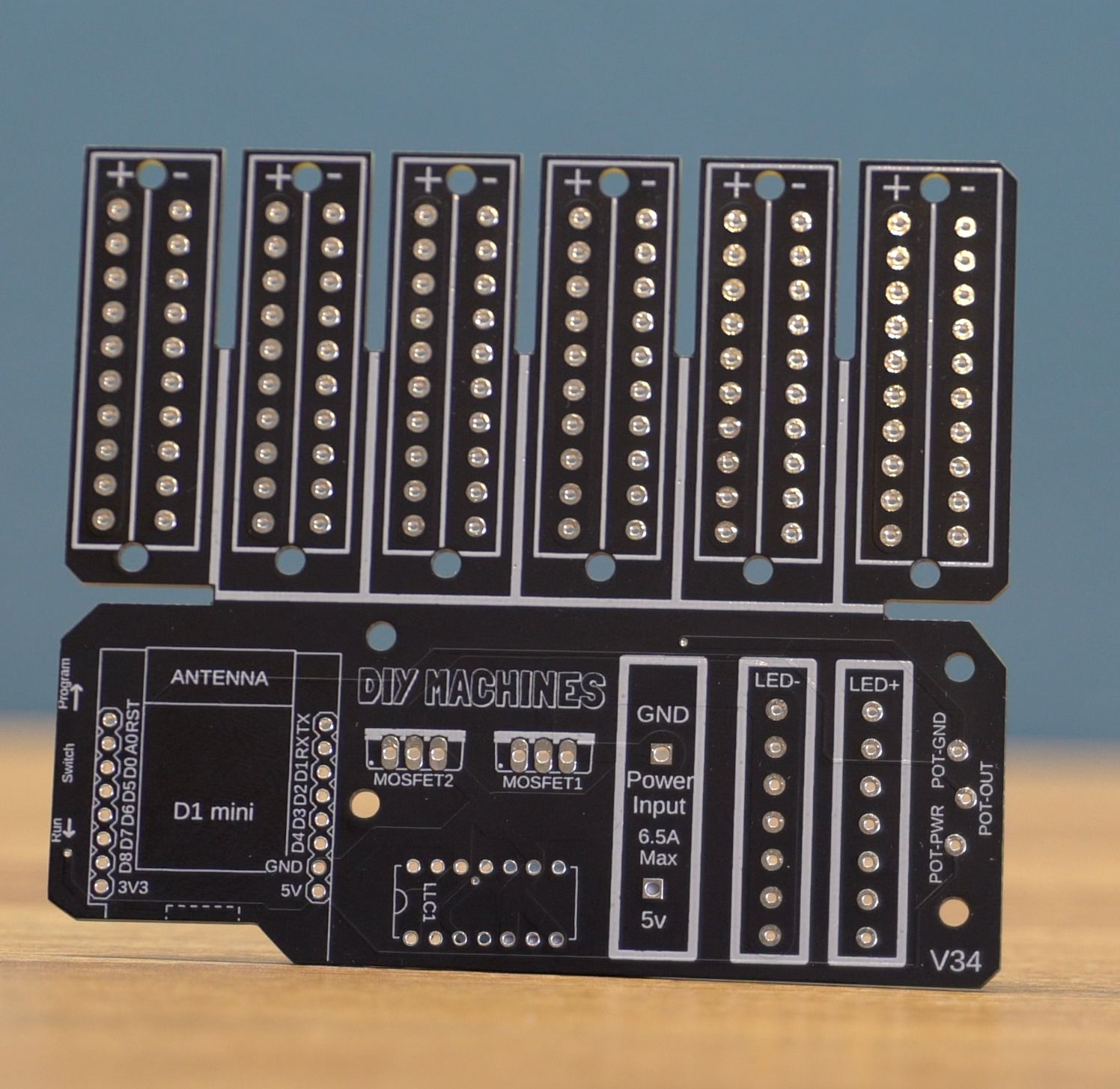
How to upgrade your desk to include smart responsive LED lighting and 3D printed upgrades to make your life easier!
We review Elegoo's new computationally superior speed demons... and wow they're fast!

3D Print your own moduler Bluetooth Speaker with cool disco lighting and modular speaker design

How to build your own Filament Spool Smart Lamp
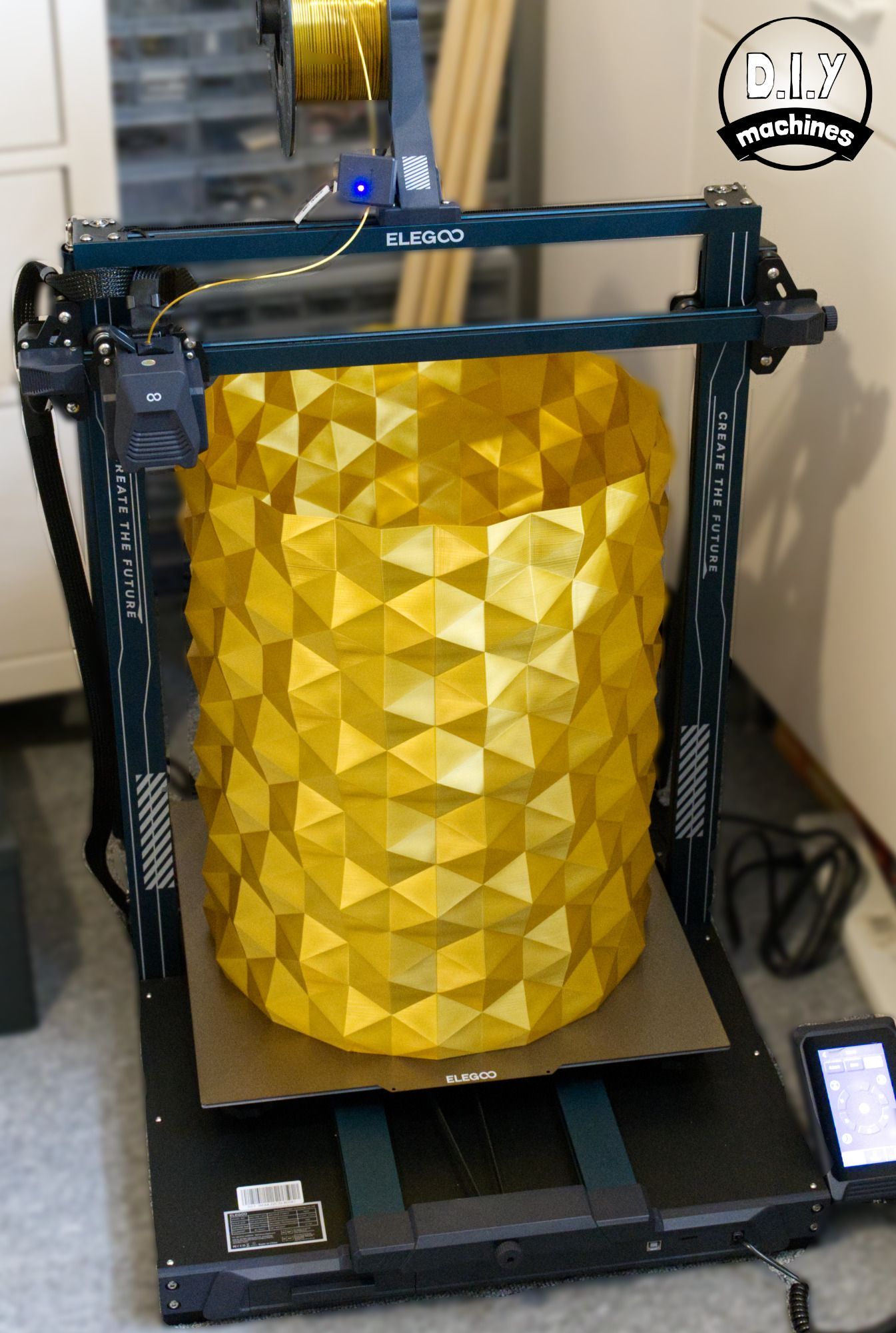
A massive build volume for a smaller price.
Please consider supporting DIY Machines
Subscribe and share
Share projects with friends and family if you think they'll enjoy it. Spread the love.

